UBC Formula Electric
Quad-motor torque vectoring algorithm
Sept. 2024 - Dec. 2025
This project aimed to overhaul the team’s driving algorithm, enhancing the car’s performance in driving events at the FSAE Formula Electric competition. The goal was to integrate cutting-edge research on electric motor vehicles and apply control theory to optimize power delivery for maximum efficiency across various driving scenarios.
The project was divided into three key modules:
- Power Limiting
- Software Active Differential
- Traction Control
Torque Vectoring Drive Algorithm
2023 - 2024
The goal of this project was to completely revamp the team’s driving algorithm and to improve the car’s performance in driving events at the FSAE Formula Electric competition. We went into this project looking to utilize the most recent research being done on electric motor vehicles, and apply our knowledge of control theory to create an algorithm that utilized all the available power the vehicle could deliver in the most efficient way possible for all the different driving events.
The project was split into three main modules:
- Power limiting
- Software active differential
- Traction Control
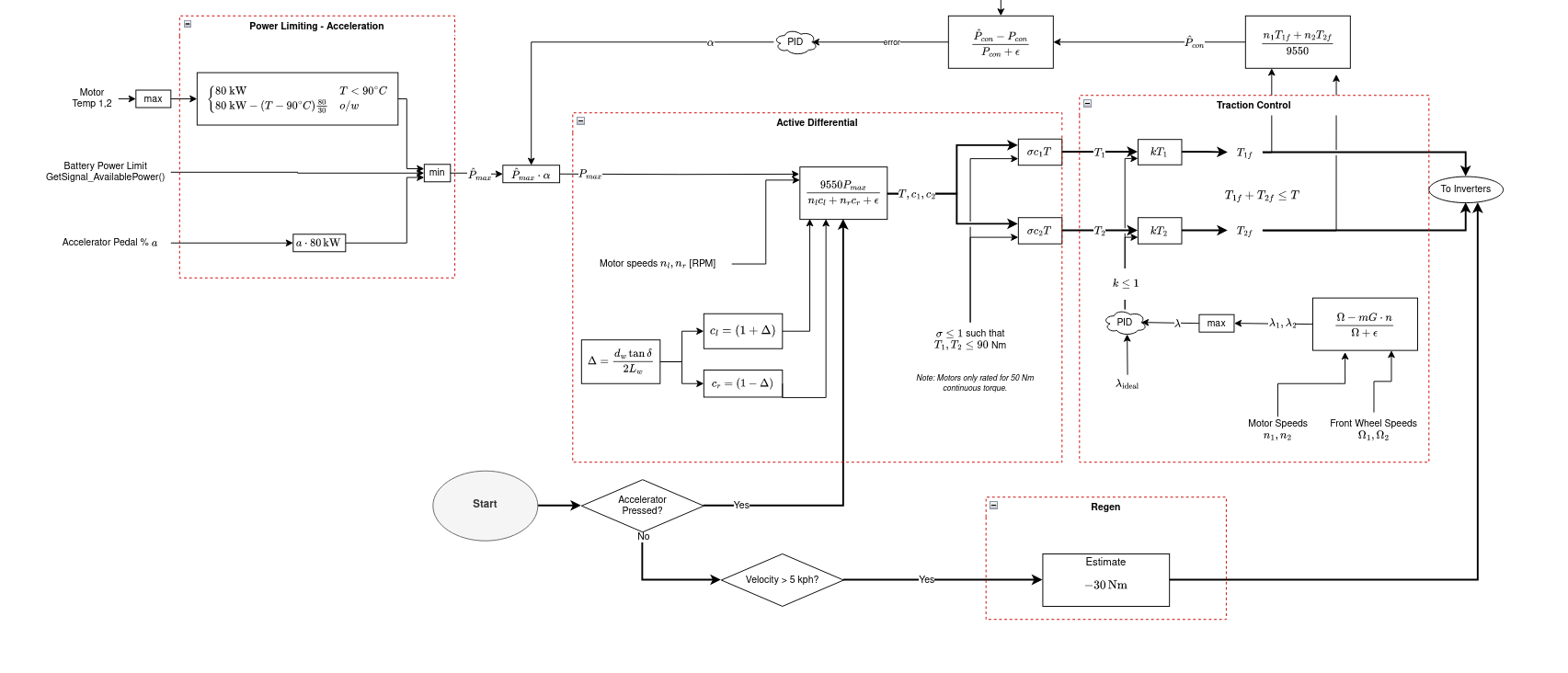
1. Power Limiting Module
The goal of this module was to calculate the absolute most available power to the car at any given point, while taking in safety considerations including the temperature limits of our motors and inverters, the state of charge of our battery pack, and of course the driver’s inputs, e.g. steering wheel angle and accelerator/brake pedal positions. The limiting factor for power limit is often the battery’s state of charge (SOC). We cannot use regenerative braking too much at high SOC, and we can’t pull too much power from the battery at low SOC, due to voltage sagging under high discharge currents.
2. Software Active Differential
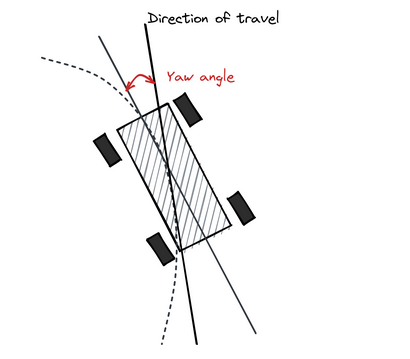
This module takes in the steering wheel angle as input, and modulates the left-to-right motor torques to improve the cornering behavior of the car. By applying different torques to each side, we can apply a net moment on the car, causing an angular acceleration in the yaw axis to help us steer around the corner. Additionally, we can take advantage of the traction benefits of the car rolling and causing an increased downforce on the outside wheels of the car.
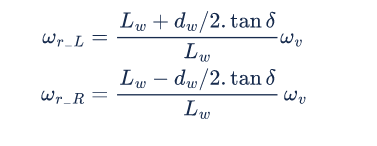
From Draou 2013, we substitute wheel speeds \(\omega_{L,R}\) for torque requests \(T_{L,R}\)
3. Traction Control
This module’s job is to detect when we are slipping and reallocate torques to maximize traction with the ground to stabilize the car. You can think of it as a PID loop that is trying to set the slip ratio of the rear wheels with a value near zero.